AZoM speaks with Dr. Robert Shepherd from Cornell University. In their research, Dr. Shepherd and his team made a crucial component for a technology that could make inflatable braille that changes shape under a user’s touch a reality. Triggered by combustion, Dr. Shepherd and his team created a haptic array of densely packed actuators that enable silicone membrane “dots” to pop up.
What inspired your research into developing a critical component for a technology that enables inflatable braille that changes shape under the user’s touch?
Making scalable, closely spaced, actuation array platforms have proven quite difficult, regardless of the application. In exploring our combustion concept, we learned of the longstanding initiative to develop portable refreshable braille displays for blind computer users. Its potential benefit drew us to make this our focused technological application.
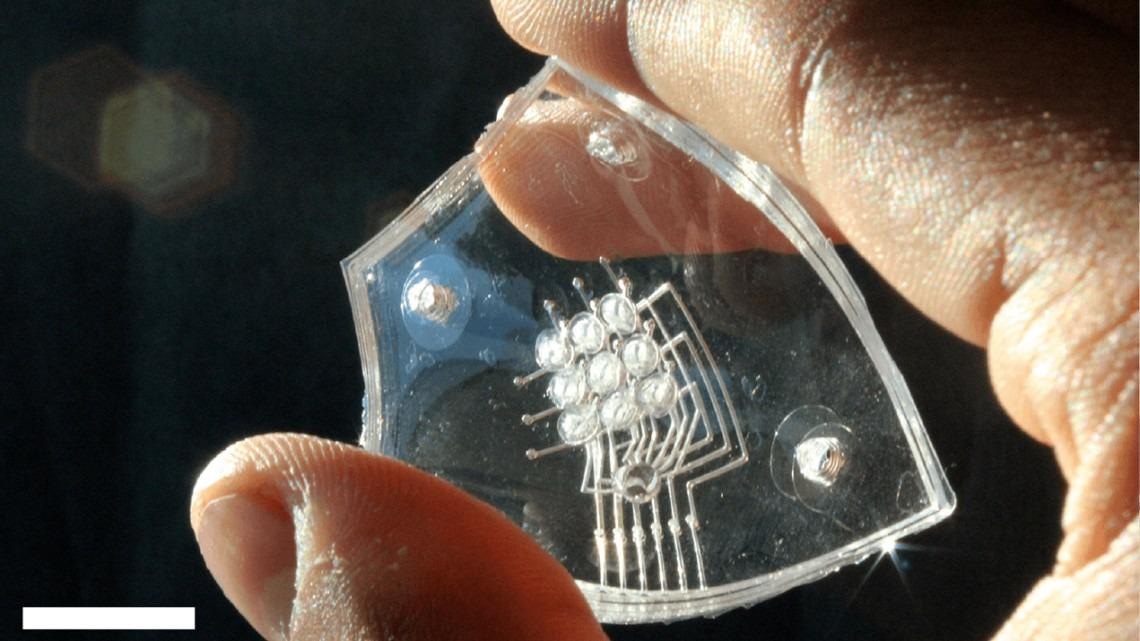
Image Credit: Cornell University
Can you provide an overview of this novel technology?
The device can be thought of as a grid of tiny cylinder chambers, made out of silicone, each with a silicone membrane on top. A mixture of methane and oxygen continuously flows through the cylinders.
To generate actuation, applying a high voltage to liquid metal electrodes causes a spark between small ignition wires in the cylinder. The resulting combustion heats and expands the gas, pushing the silicone membrane outward, creating a brief, but powerful pulse. The products are then exhausted from the cylinder and it immediately becomes ready for the next actuation.
Despite current technological advancements, portable, electronic tactile displays remain an unresolved actuation technology challenge. Why is this?
As it turns out, it’s just practically a hard task to pack actuating materials and mechanisms at the size and density that refreshable braille displays demand. Phenomena we can usually ignore, like electromagnetic interference and heat transfer, have a significant influence on system operation at these scales.
Since each dot requires a means of independently controlling its motion, components like valves and voltage boosters must often be multiplied to match the thousands of actuators in a full-scale display, which also multiplies the display’s cost and weight. Mechanical systems with high degrees of freedom generally do not have such extreme spatial constraints.
When developing a dynamic braille display for electronics, other researchers have utilized motors, hydraulics and tethered pumps to apply a sufficient amount of force to each dot. Why did you not opt to use an electromechanical system?
Off-the-shelf, traditional mechanical components do not properly scale down to the sizes required for operating braille dots. This is for the reasons we discuss in the previous section. Thus, we wanted to try to synthesize a more integrated design that both saves space and increases the power output.
In your array design, why is a combustion-based method more desirable?
Combustion, in combination with the stretchable materials we use in our demonstration, has the chief advantage of simply operating in a small form factor. Each actuator only has conductive traces, silicone and combustible fuel. There are no valves, no sliding parts, and no per-dot electronic components.
Additionally, chemical fuels have the highest energy density of consumer energetic materials. So, even in the small chamber space, there is enough chemical energy to produce a strong actuation.
Did you come across any challenges during your research, and if so, how did you overcome them?
There were several challenges which we encountered while developing our system concept. Sustaining adhesion of the silicone membranes during operation was often difficult because the membrane was stretched to multiple times its initial length. Since these devices were made by hand, the initial adhesion step needed to be refined to ensure complete lamination before the adhesive cured.
How can this technology improve the lives of the blind and visually impaired?
In short, this technology can help enhance the lives of the blind and visually impaired by giving them a more cost-effective refreshable braille display option.
In your research, you mention that this stretchable and comfortable technology can potentially be integrated into soft robots and wearable virtual reality equipment that stimulates artificial touch. Are there any other applications for this technology beyond the electronics industry?
Aside from soft robotics and wearable virtual reality equipment that stimulates artificial touch, we think that these actuators can be applied to microrobots and possibly to some surgical procedures.
What are the next steps for your research?
We are currently working on scaling the system up to prove that this technology can operate a full-page display. We are also working on methods to produce lasting-yet-reversible deformations.
Where can our readers find out more about this novel technology?
Readers can find out more via our publication, titled “Valveless microliter combustion for densely packed arrays of powerful soft actuators”.
About Dr. Robert Shepherd
 Rob Shepherd received his B.S. (2002) and Ph.D. (2010) in Material Science at the University of Illinois where his research focused on developing polymeric and colloidal suspensions as 'inks' for 3D printers. He also fabricated microfluidic devices to synthesize single micron to millimeter scale parts (e.g., glass and silicon microgears). Concurrently to performing this research, he received his M.B.A. (2009) at U of I and started a company, worked with several other startups, and gained significant experience with the details of market research, financials, accounting issues, and legal aspects of entrepreneurship. In 2010, he continued his education as a post-doctoral fellow at Harvard University in George Whitesides's research group in the Department of Chemistry and Chemical Biology. In this group, he developed pneumatic actuators in soft elastomers that took the form of a machine capable of moving in multiple gaits: walking and undulating. These actuators have also been used for low-cost manipulators, and in concert with a microfluidic system for biomimetic camouflage & display.
Rob Shepherd received his B.S. (2002) and Ph.D. (2010) in Material Science at the University of Illinois where his research focused on developing polymeric and colloidal suspensions as 'inks' for 3D printers. He also fabricated microfluidic devices to synthesize single micron to millimeter scale parts (e.g., glass and silicon microgears). Concurrently to performing this research, he received his M.B.A. (2009) at U of I and started a company, worked with several other startups, and gained significant experience with the details of market research, financials, accounting issues, and legal aspects of entrepreneurship. In 2010, he continued his education as a post-doctoral fellow at Harvard University in George Whitesides's research group in the Department of Chemistry and Chemical Biology. In this group, he developed pneumatic actuators in soft elastomers that took the form of a machine capable of moving in multiple gaits: walking and undulating. These actuators have also been used for low-cost manipulators, and in concert with a microfluidic system for biomimetic camouflage & display.
Disclaimer: The views expressed here are those of the interviewee and do not necessarily represent the views of AZoM.com Limited (T/A) AZoNetwork, the owner and operator of this website. This disclaimer forms part of the Terms and Conditions of use of this website.