Designers and engineers have long admired the forms of nature and its ability to adopt new ways of solving problems and integrate seamlessly with the surrounding environment. Nature has a seemingly endless capacity to produce systems that are both innovative and high-performing.
In developing new technological systems designers and engineers have adapted to the concept of biomimicry which is producing innovative high-performing models, tools, and structures based on those in the natural world.
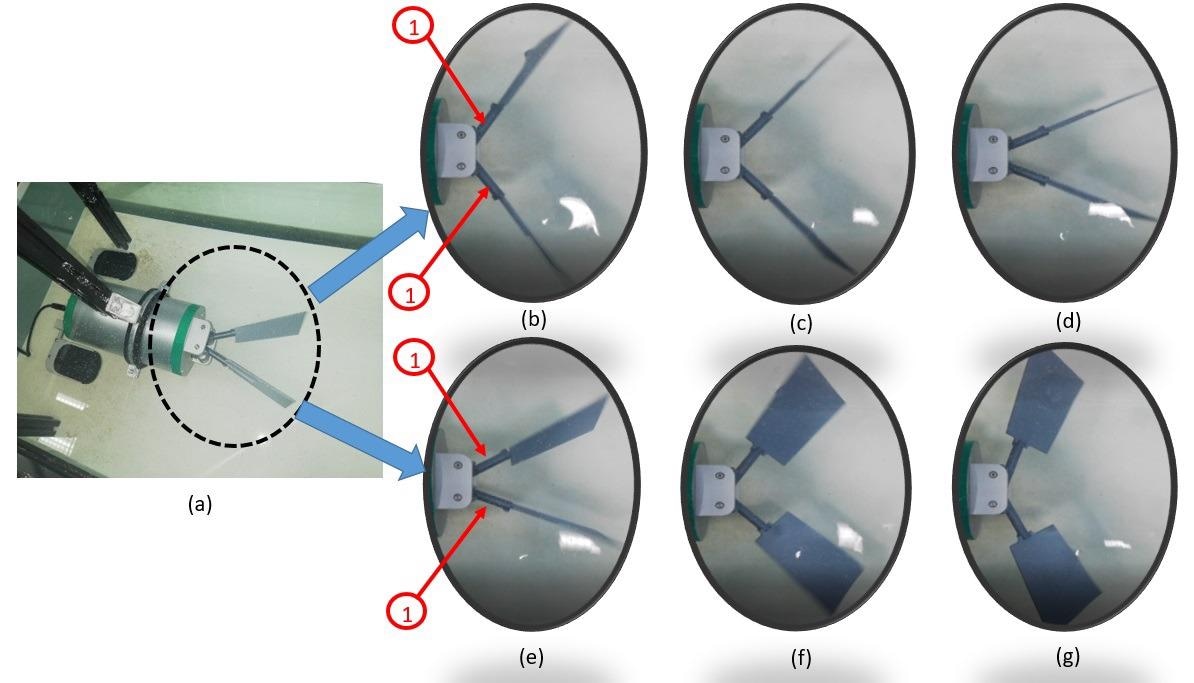
A BUUV (a) with subsequent phases of movement: (b–d) power stroke and (e–g) return stroke; 1—additional joint. Image Credit: Piskur, P et al., Energies
UUV to BUUV
Unmanned underwater vehicles (UUVs), also known as underwater drones, are submersible vehicles that can navigate their way through various water systems with or without human intervention. Typically, UUVs fall into two categories, remotely operated underwater vehicles, or autonomous underwater vehicles.
Traditional underwater propulsion systems, such as screw-type axial propellors, convert torque into thrust; in other words, power from an engine turns the propellers and generates force by moving the flow of water downward and behind the blade.
However, biomimetic systems that transform UUVs to BUUVs are attracting significant attention as they demonstrate higher propulsion efficiency, enhanced maneuverability, and quieter actuation than conventional UUVs equipped with axial propellors.
Biomimetic systems may be designed to move like a fish, turtle, seal, or other marine animals which undulate to generate propulsion by pushing water against passing waves. However, the impact of tail oscillation on the fluid flow around a hull may result in vortices and thus necessitates the study of the FSI and the vortex structures.
Furthermore, existing BUUV designs often have many moving parts that couple rigid and flexible forms which result in a complex structure not without its flaws: “This type of construction is difficult to control, expensive and increases the risk of flooding the electronic components inside,” explains Dr. Paweł Piskur at the Faculty of Mechanical and Electrical Engineering, Polish Naval Academy, Gdynia, Poland.
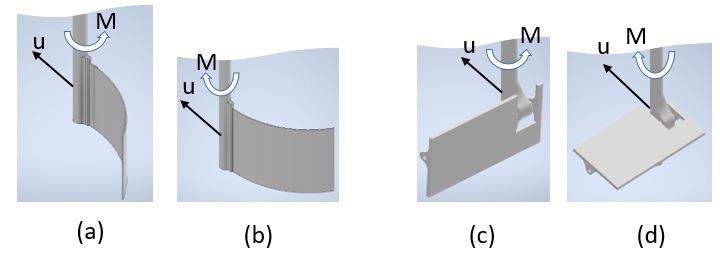
Two types of propulsion systems used for tests: the flexible fin during counterclockwise (a) and clockwise (b) movement; the flipper with an additional joint during the power (c) and return (d) stroke. Image Credit: Piskur, P et al., Energies
Innovating Propulsion Systems
The novel biomimetic propulsion systems the researchers have designed incorporate two fins fitted to a drive mechanism with fewer moving parts and components than existing models. “The movement of both fins outwards is simply an auxiliary movement that allows the specified values of the maximum angular deflection of the fins regarding the longitudinal axis of symmetry to be obtained, which is required to begin the work movement, says Piskur.
The fins work by driving the fins inwards and pushing the water outwards in opposition to the body of the BUUV, and then return to the start position with a force reduction generated by a positional shift: “During the movement, the fins alter their position from the vertical to the horizontal plane. This reduces the hydrodynamic drag of the fins during outside movement and, as a result, the drag of underwater vehicles,” explains Piskur.
The objective of this system is to address some of the challenges associated with present biomimetic models by reducing the number of design and control variables to demonstrate the difference between an innovative propulsion system and an undulating system.
“Increasing the velocity of the fins during thrust generation while decreasing the velocity of the fins during the returning movement should result in even better efficiency,” says Piskur.
The propulsion system demonstrated higher thrust capabilities and improved net efficiency for low-speed movement, thereby ensuring the biomimetic nature of the movement. The team state that further tests will be conducted to evaluate the impact of a body on the novel propulsion system design as well as incorporating an additional joint and flexible fins to accommodate various styles of movement.
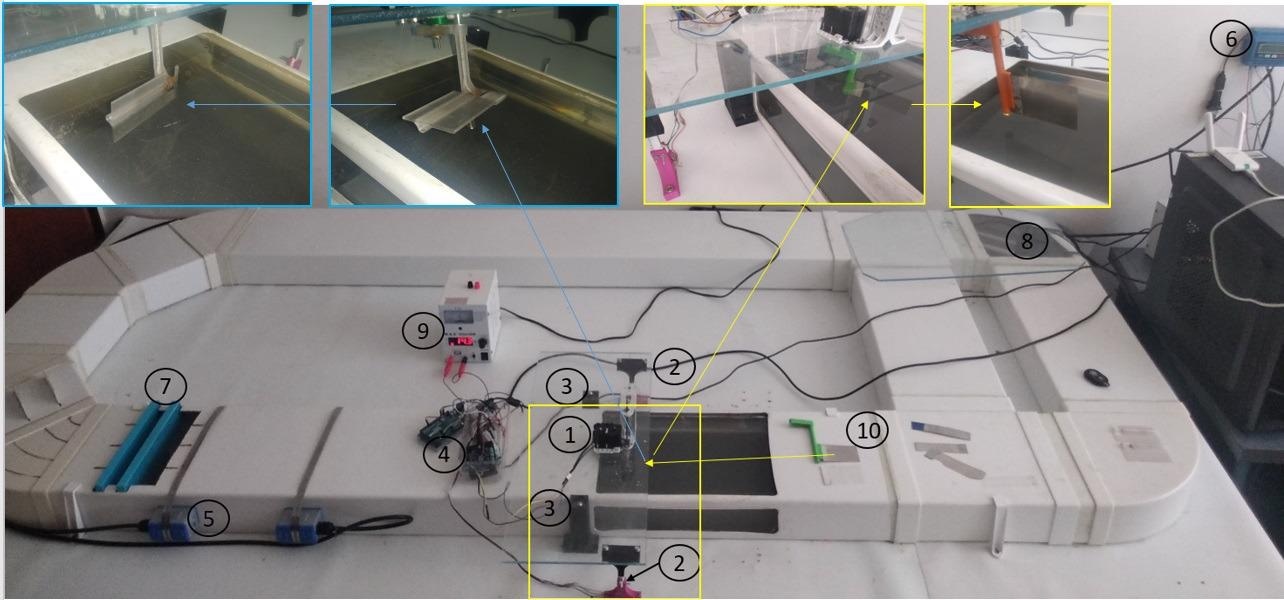
The laboratory water tunnel: 1—servomechanism Dynamixel MX-12W, 2—strain gauges, 3—ball bearings, 4—micro-controller unit (MCU) and strain gauges amplifier, 5—ultrasonic flow sensors, 6—ultrasonic flow unit, 7—water steering wheels, 8—external water pump, 9—power supply, and 10—the fin. Image Credit: Piskur, P et al., Energies
The team hopes that the promising results of this study will transfer to newer and upgraded models based on the same system and as such help create BUUVs that accurately replicate the movements and high energy efficiency of living marine organisms. The team has filed for a patent for their design which is currently underway.
Advanced robotics including UUVs and BUUVs open up an ocean of possibilities for exploring underwater environments that can help with ocean surveillance, seabed mapping, pipeline inspections, and many more.
References
Piskur, P.; Szymak, P.; Przybylski, M.; Naus, K.; Jaskólski, K.; Żokowski, M. Innovative Energy-Saving Propulsion System for Low-Speed Biomimetic Underwater Vehicles. Energies 2021, 14, 8418. https://www.mdpi.com/1996-1073/14/24/8418
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.