A new grounded metamaterial design preserves programmed displacement responses even after major shape changes, opening a path toward adaptive structures, robotic skins, sensing systems, and precision devices that stay mechanically calibrated as they reconfigure.

Image created using OpenAI’s image-generation tools, based on the author-provided conceptual figure and inspired by Huang, Y., Tang, Y., Li, Z., Haberman, M. R., & Chen, Y. (2026). Grounded reconfigurable metamaterials with customized mapping-invariant behavior. Nature Communications. https://www.nature.com/articles/s41467-026-73240-8
A recent study in the journal Nature Communications introduces grounded metamaterials that maintain stable displacement behavior even after major shape reconfiguration. The researchers from the Hong Kong University of Science and Technology, Hong Kong, and the University of Texas at Austin, USA, present a transformation-based design strategy that decouples the displacement response from microstructural geometry, enabling the materials to retain their intended displacement performance. Their work also demonstrates programmable deformation modes that are not achievable in conventional elastic materials.
Transformation-Based Design for Configuration-Invariant Mechanics
Mechanical metamaterials can achieve specialized functions such as stiffness tuning, energy absorption, and shape morphing through carefully engineered architectures. However, their mechanical performance often changes when the structure bends, twists, unfolds, or undergoes geometric reconfiguration. This limitation reduces the reliability of reconfigurable systems used in applications such as deployable aerospace structures, soft robotics, and adaptive sensing technologies.
Earlier metamaterial designs primarily focused on optimizing specific geometries to achieve targeted mechanical responses. Many systems struggled to maintain stable displacement behavior after shape transformations, as their performance remained strongly coupled to microstructural arrangement. The researchers argue that future reconfigurable materials must preserve intended displacement responses even during large geometric changes.
The study introduces a grounded reconfigurable metamaterial system that combines rotationally constrained reconfigurable masses with Willis coupling. This design enables the material to maintain nearly identical displacement fields across different geometric configurations. The researchers also incorporated programmable displacement gauges into the lattice architecture to create customized deformation modes, including asymmetric tension responses and tension-induced buckling.
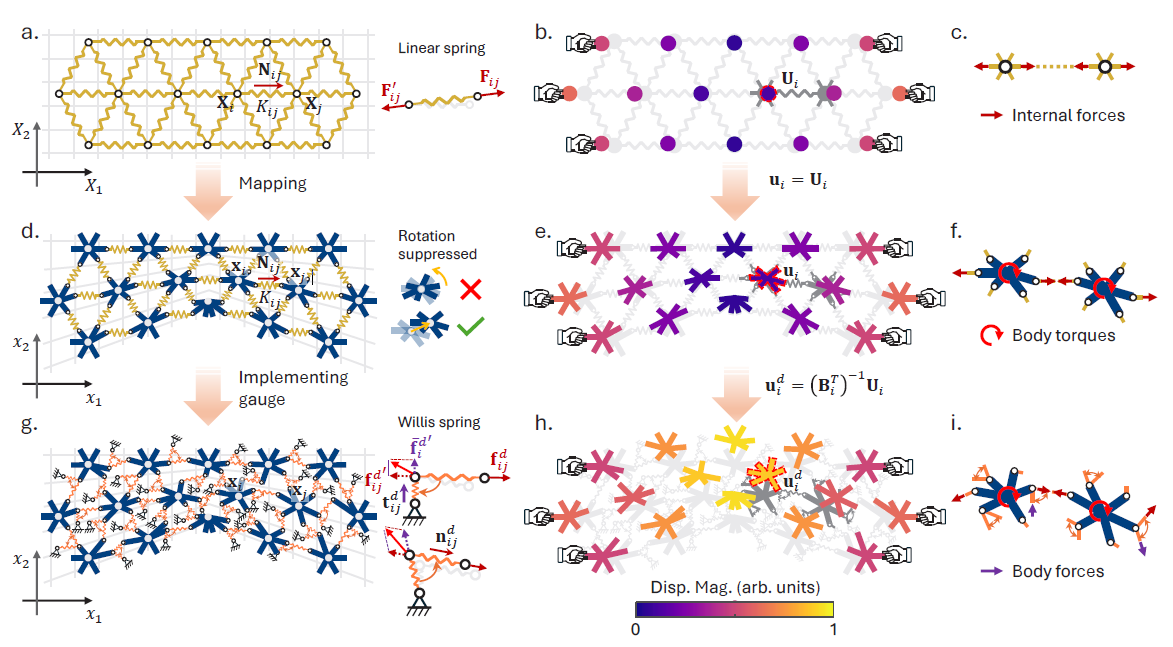
Design grounded metamaterials (GMMs) based on the transformation method. (a) A free-standing lattice composed of pin-connected linear springs. (b) The free-standing lattice is deformed by uniaxial tension. (c) The concurrent internal forces on two adjacent nodes in (b) (shown in dark gray). (d) The GMM is derived from a coordinate transformation in which rotations of reconfigurable masses are suppressed, while translational motion is free. (e) The GMM is deformed by the same uniaxial tension as that in (b), where the displacement field remains unchanged. (f) The non-concurrent internal forces on two adjacent masses in (e) (shown in dark gray), and reaction body torques are exerted on the masses. (g) The GMM is composed of Willis springs and rotation-suppressed reconfigurable masses derived using the transformation method, with a customized displacement gauge implemented. (h) The deformation of the GMM (shown in (g)) by the same uniaxial tension as that in (b). Customized tension-induced buckling is achieved. (i) The internal forces, body torques, and body forces on two adjacent masses in (h) (shown in dark gray).
Engineering the Grounded Metamaterial Architecture
The study examined how conventional free-standing lattices lose stable displacement behavior after geometric reconfiguration because internal spring forces become non-concurrent, generating torques during deformation. The team introduced specially engineered grounding mechanisms that constrain rotational motion while allowing free translational movement. Each reconfigurable mass used a starburst-like geometry that could be adjusted without changing spring orientation or stiffness. This design enabled the metamaterial to preserve nearly identical displacement fields even after significant geometric transformations.
The study also explored the role of grounded body torques in maintaining mapping-invariant displacement behavior. When reconfiguration disrupted the alignment of internal forces, the grounded constraints automatically balanced the resulting torques and stabilized the displacement response. This approach allowed the metamaterial to behave mechanically as though its geometry had remained unchanged.
The researchers further incorporated linkage-based Willis springs into the lattice architecture to achieve programmable deformation control. These components combined four-bar linkages with torsional elastic cylinders to couple internal deformation with grounded reaction forces. The design enabled customized displacement gauges that generated unconventional deformation modes, including asymmetric tension responses and tension-induced buckling behavior.
The team validated the framework through numerical simulations and experimental testing using digital image correlation measurements. They evaluated multiple lattice geometries under translation, tension, bending, and complex shape reconfiguration to confirm stable, programmable displacement performance across configurations.
Experimental Validation of Mapping-Invariant and Programmable Deformation
The experimental results showed that the grounded metamaterials maintained nearly identical displacement fields across multiple geometric configurations. The researchers tested three lattice arrangements, including rectangular, parallelogram, and randomly distorted structures, under uniaxial tension. Despite their different shapes, all three configurations produced almost identical displacement distributions when evaluated in material coordinates.
The study revealed highly unconventional displacement responses compared to ordinary elastic systems. In conventional lattices, a parallelogram-shaped structure subjected to tension would typically undergo bending deformation. In contrast, the grounded metamaterial eliminated this bending response because grounded body torques compensated for the altered internal force paths created during reconfiguration.
The researchers also investigated programmable displacement control using displacement gauges embedded within the lattice architecture. One displacement gauge introduced position-dependent modulation along the horizontal direction. Under rigid-body translation, the metamaterial combined translation and shear deformation instead of moving uniformly. During uniaxial tension, the structure displayed asymmetric stretching without bending, while bending tests produced distinct curvature profiles across different lattice layers.
The researchers then reconfigured the same metamaterial into parallelogram and irregular lattice geometries to examine whether these customized deformation modes remained stable after remapping. The structures preserved nearly identical displacement behavior under translation, tension, and bending loads across all configurations. Numerical simulations closely matched the experimental measurements throughout the study.
The experiments identified two key physical mechanisms responsible for the observed behavior. Grounded body torques stabilized displacement fields during geometric reconfiguration, while Willis springs generated tailored body forces that programmed the metamaterial's deformation response.
Outlook for Adaptive Mechanical Systems and Functional Metamaterials
The study establishes grounded metamaterials as a new strategy for designing stable and programmable displacement responses in reconfigurable materials. The work shows that combining transformation elasticity, grounded architectures, and Willis coupling can preserve displacement behavior even after large geometric reconfiguration, overcoming a major limitation in conventional metamaterial systems.
The researchers directly linked geometric transformation, grounded body torques, and programmable deformation control by integrating reconfigurable lattice architectures with experimentally validated Willis spring designs. The findings further highlight the importance of mapping-invariant displacement fields and grounded force balancing in maintaining stable displacement responses during stretching, bending, and shape change.
The design principles introduced in the study could support the development of deployable aerospace structures, adaptive soft robotic systems, sensing skins, tunable acoustic and electromagnetic manipulation systems, telescope mirror supports, and mirror-focusing systems for photothermal power plants. The framework may also enable mechanically programmable systems capable of maintaining calibrated responses under continuous reconfiguration. Overall, the research provides a scalable foundation for developing next-generation metamaterials with customizable deformation behavior, stable displacement functionality, and broad engineering adaptability.
Download your PDF copy by clicking here.
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.