Hexapods provide a straightforward and sophisticated solution for intricate, multi-axis movement within a compact design, especially when compared to stacked stages. MKS Newport offers maximum load capacities for applications such as astronomy, automotive manufacturing, and materials analysis.
- High stiffness and stability
- Centered load capacities up to 450 kg
- High-speed, long-range travel
Specifications
Source: MKS Newport
| Models |

HXP200-MECA |

HXP200S-MECA |

HXP1000-MECA |
| Size |
Ø335 x 309 mm |
Ø410 x 300 mm |
Ø550 x 395 mm |
| Travel Range X, Y, Z1 |
± 59, ± 54, ± 25 mm |
± 40, ± 45, ± 27 mm |
-62/+93, ± 69, ± 39.5 mm |
| Travel Range ΘX, ΘY, ΘZ |
± 15, ± 14.5, ± 30 ° |
± 9, ± 8, ± 15 ° |
± 11, ± 10, ± 19.5 ° |
Minimum Incremental
Motion X, Y, Z2 |
0.2, 0.2, 0.1 µm |
0.15, 0.15, 0.15 µm |
0.30, 0.30, 0.16 µm |
Minimum Incremental
Motion ΘX, ΘY, ΘZ |
0.1, 0.1, 0.2 mdeg |
±0.1, 0.1 0.1 mdeg |
0.06, 0.06, 0.10 mdeg |
Unidirectional Repeatability
X, Y, Z - Typical |
± 0.125, ± 0.125, ± 0.1 µm |
± 0.1, ± 0.1, ± 0.1 µm |
± 0.15, ± 0.15, ± 0.08 µm |
Unidirectional Repeatability
ΘX, ΘY, ΘZ - Typical |
± 0.1, ± 0.1,
± 0.125 mdeg |
± 0.1, ± 0.1,
± 0.1 mdeg |
± 0.03, ± 0.03,
± 0.05 mdeg |
| Maximum Speed X, Y, Z |
81, 70, 26 mm/s |
47, 54, 29 mm/s |
9, 9, 4 mm/s |
| Maximum Speed ΘX, ΘY, ΘZ |
16, 15, 41 °/s |
10, 9.3, 16.5 °/s |
1.4, 1.4, 2.8 °/s |
| Rigidity X, Y, Z3 |
3, 3, 40 N/µm |
6, 6, 30 N/µm |
10,10,100 N/µm |
| Centered Load Capacity4 |
500 N |
850 N |
4500 N |
| Connectors |
DB15 Male (6) |
DB15 Male (6) |
DB25 - Male (6) |
| Cable Length |
5 m |
5 m |
3 m |
| Weight |
15.5 kg |
24.9 kg |
60 kg |
| Thread Type |
M6 |
M6 |
M6 |
Notes:
- Travel ranges are interdependent. The listed values are maximum travels per axis when all other axes are in their centered position.
- Open-loop values shown
- Stiffness depends on Hexapod position. Values are given for all axes in their centered position.
- Value shown for horizontal base plate. See graphs for maximum payload height and cantilever distance on product pages.
Features
Hexapod HXP200
HXP200-MECA 6 Axis Hexapod. Video Credit: MKS Newport
HXP-1000 MECA
HXP1000-MECA High Load Hexapod. Video Credit: MKS Newport
Parallel Kinematic Motion
Hexapods are innovative and efficient solutions for intricate motion applications that demand significant load capacity and precision across six independent axes. Parallel kinematic motion devices deliver six degrees of freedom (X, Y, Z, pitch, roll, and yaw) within a compact framework for multi-axis positioning.
In contrast to the approach of stacking several stages, hexapods eliminate the need for moving cables, are more cost-effective overall, and provide motion that is error-compensated.
Hexapod Logitech Controller Demo
Video Credit: MKS Newport
High Precision Actuators

Image Credit: MKS Newport
The performance quality of actuators significantly influences the overall motion capabilities of a hexapod. Leveraging more than 55 years of expertise from Newport in actuators, the top plate of HXP hexapods is powered by six high-performance actuators, which are well-established in the industry and equipped with encoder feedback at the leadscrew nut.
This configuration ensures precise minimum incremental motion, minimal backlash, and rapid speed.
Innovative Actuator Joints

Spherical joint to enhance stiffness in a compact, low-profile design. Image Credit: MKS Newport
The 12 joints that connect the actuators to the base plate and the moving top plate are as crucial to overall motion performance as the actuators themselves.
Instead of conventional universal joints, HXP hexapods employ ceramic spherical joints to maintain a constant preload throughout the entire range of motion.
This design enhances rigidity, minimizes material stress, and improves performance while preventing corrosion. Consequently, the hexapod exhibits greater rigidity and a higher load capacity than other hexapods of similar size.
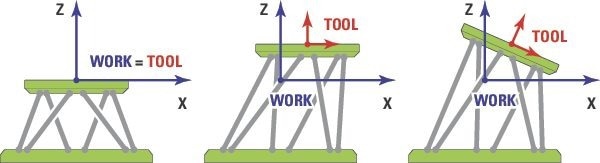
Two Virtual Centers of Rotation
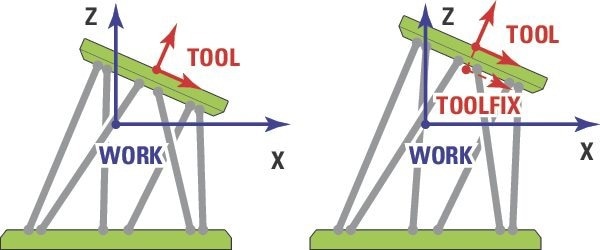
Translation Along Tool. Image Credit: MKS Newport
Rotation Around Tool. Image Credit: MKS Newport
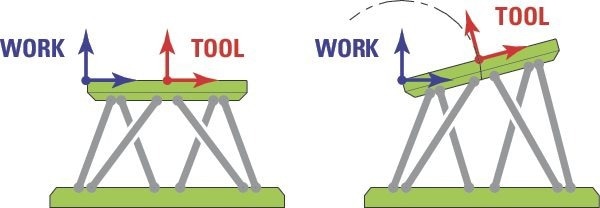
Rotation Around Work. Image Credit: MKS Newport
Hexapod motion is characterized by both global and local coordinate systems, which enhance the intuitiveness of programming motion for standard research, metrology, and manufacturing applications.
Users can program up to two virtual pivot points without requiring coordinate system transformations or shutting down the controller.
These two virtual pivot points serve as the origins for the two definable coordinate systems: Tool, which moves in conjunction with the top plate, and Work, which acts as a stationary reference.
This setup enables users to better visualize the manipulation of the sample and tool. For this six-axis device, motion complexity is streamlined, facilitating straightforward user program development.
RightPath™ Trajectory Control
Image Credit: MKS Newport
In parallel kinematic devices, the movement of the hexapod legs is synchronized; all legs initiate and cease motion simultaneously, consistently completing the same segment of the trajectory. Consequently, the motion may not necessarily correspond to a straight path within the World coordinate system.
While this effect is minimal for small movements, it can become significant for larger ones. Newport engineers developed a solution to reduce the runout of hexapods through RightPath™ Trajectory Control. This firmware feature, exclusive to Newport hexapods, facilitates scanning motion along three distinct trajectory functions, line, arc, or rotation, in either Work or Tool.
These trajectory functions enable movement with:
- Minimal runout (deviation from the trajectory) throughout the motion
- A continuous multi-dimensional motion path
- A constant velocity along the trajectory path
- Equal acceleration at both the start and end of the movement: acceleration = deceleration
- All calculations are conducted prior to motion, ensuring no lag time
HexaViz™ Simulation Software
The HexaViz hexapod simulator enables users to identify the Newport Hexapod model that most appropriately meets application requirements before making a purchase.
Newport offers complimentary HexaViz Hexapod Simulation Software, featuring a user-friendly virtual hexapod interface for assessing travel range, load capacity, force, and torque specifications.
Hexapod Motion Controllers

Image Credit: MKS Newport
HXP-ELEC high-performance multi-axis hexapod motion controllers are specifically designed for use with Newport Hexapods. The HXP-ELEC employs the same hardware as the Newport XPS Universal High Performance Motion Controller/Driver, but it comes preconfigured with specialized firmware tailored for controlling the Hexapod mechanics.
The firmware features facilitate easier programming and integration.
High Accuracy, High Precision, and Vacuum Compatible Versions

Image Credit: MKS Newport
The HXP series includes a High Accuracy Hexapod variant that delivers precise positioning, making it suitable for applications that demand positional accuracy.
For vacuum applications, the Vacuum Compatible HXP is rated for operation at 10-6 hPa. Additionally, the High Precision HXP series serves as a flexible solution for various other applications.
Hexapod Applications
Interferometry

Image Credit: MKS Newport
Interferometry is broadly defined as a collection of techniques that involve the superposition of waves, typically electromagnetic, to gather information. This method can demonstrate the flatness of optical surfaces with exceptional resolution.
Newport provides a wide variety of hexapod sizes designed for high-precision interferometry. Additionally, motion specialists are capable of custom-engineering a hexapod tailored to user requirements, accommodating optics exceeding 1.5 m in diameter.
Mirror or Optic Positioning

Image Credit: MKS Newport
Optical assemblies frequently require precise alignment and positional tolerances for delicate optical components to effectively direct beams. Hexapods offer exceptional precision and consistent motion across six degrees of freedom.
When combined with feedback systems, optical systems that use hexapods can fulfill even the most stringent requirements.
Optical Fiber or Device Alignment
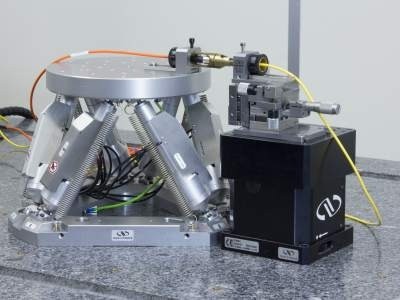
Image Credit: MKS Newport
To achieve proper alignment of optical fibers or devices (whether single- or multi-mode, and from single- to multi-channel, including Si photonics), it is essential to control motion not only in the X, Y, and Z axes but also in terms of tip and tilt. When integrated with alignment software such as APOGEE, this approach yields a comprehensive automated alignment system.
Imaging and Microscopy
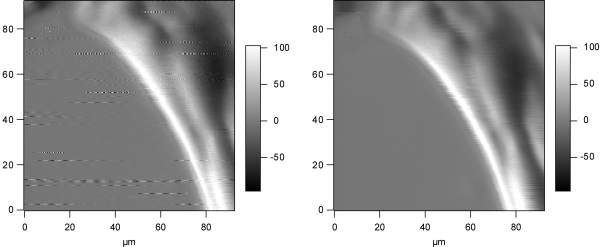
Image Credit: MKS Newport
Optical and electron imaging/microscopy use the principles of diffraction, reflection, or refraction of light or electron beams as they interact with the specimen. The resulting scattered radiation or electrons are quantified and used to create an image.
When it comes to imaging intricate small structures, Newport hexapods provide a significant advantage due to their high precision, six degrees of freedom, and motion control, all within a compact design.
Diffractometers

Image Credit: MKS Newport
Newport is highly proficient at creating advanced diffractometry solutions for synchrotrons. The optimal method for positioning samples at the beam ends is to use hexapods. These solutions support both fundamental and applied research across various fields, including life health sciences, physics, and materials sciences.
Image Credit: MKS Newport
WORLD: Common Reference
WORK: Defined Relative to World
TOOL: Defined Relative to The Top Plate
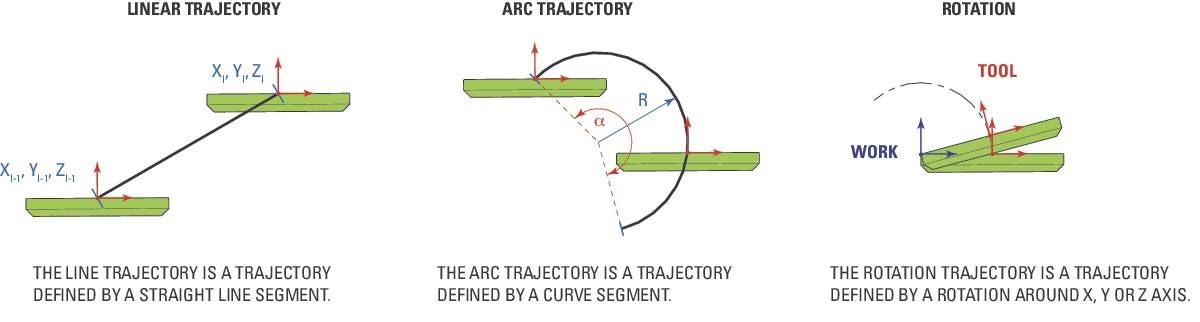
Image Credit: MKS Newport
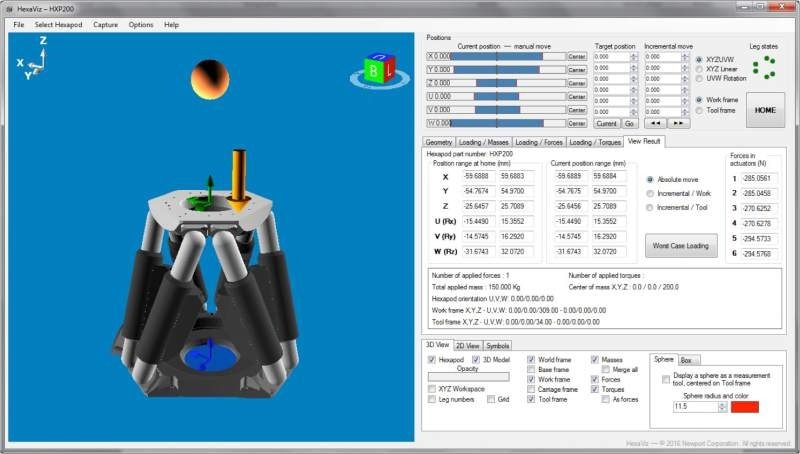
Image Credit: MKS Newport
HexaViz™ - Hexapod Simulation Software
Video Credit: MKS Newport
HXP Hexapods - 6-Axis Parallel Kinematic Positioning Systems-2024
Video Credit: MKS Newport
HXP50 Hexapod for Fiber Alignment
Video Credit: MKS Newport